Hexapod (in development)
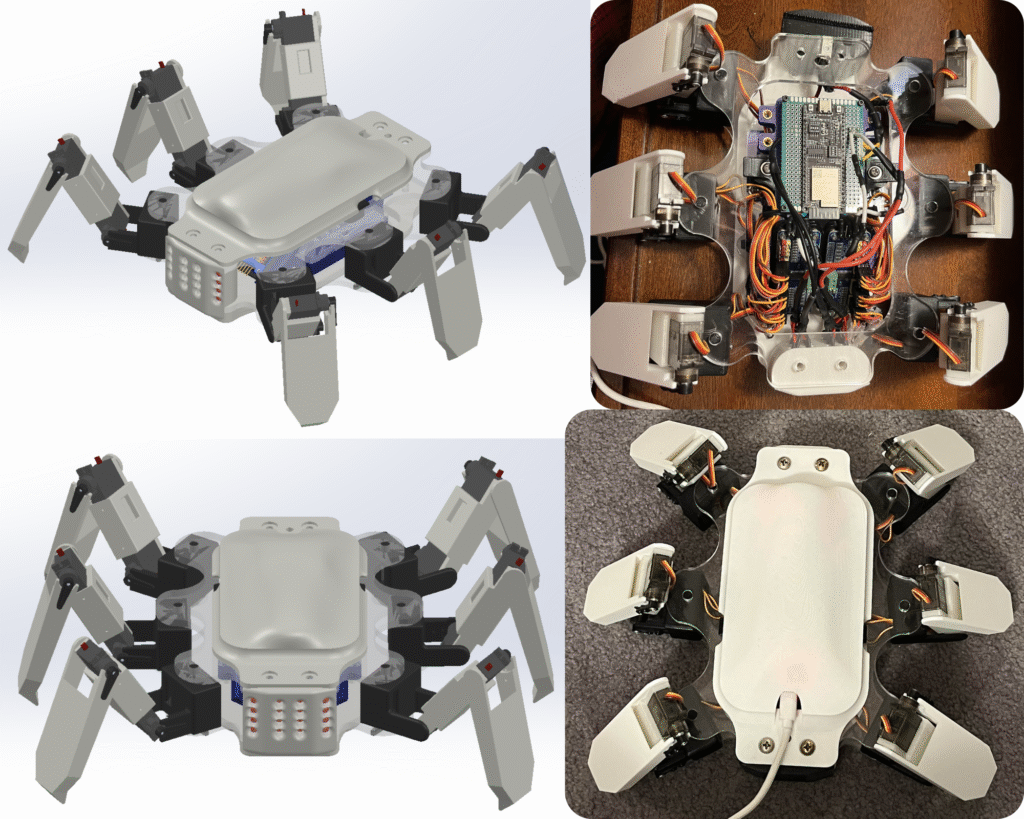
Hexapod is a six-legged walking robot whose purpose is to further my knowledge of the relationship of electronic components such as motors, microcontrollers, manufactured hardware, and computer programming. The current iteration of Hexapod features 18 servo motors, two motor controllers, one screw switch, and one ESP32 S2 Lily Go WOOR microcontroller. This has been my main independent design project, picking it up when time allows. The microcontroller needs replaced as the pins providing power to the servos is nonoperational. Once that is replaced, I will be able to use Arduino IDE to program this robot allowing me to further explore concepts such as Inverse Kinematics.
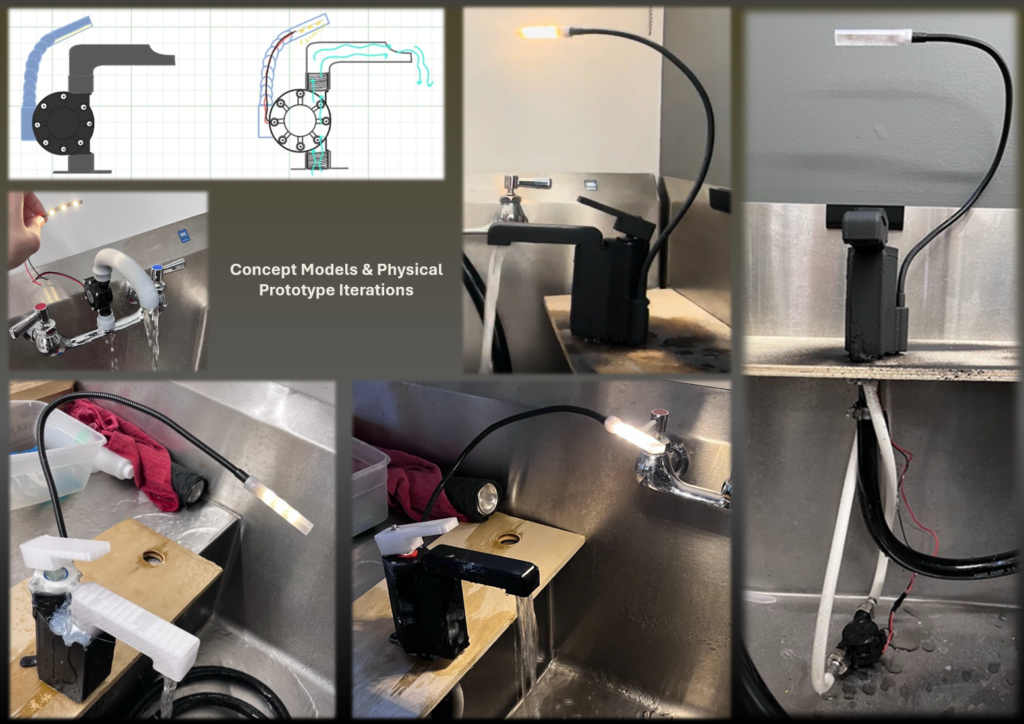
Hydroelectric Emergency Light (HEEL)

The Hydro Electric Emergency Light faucet is designed to provide usable light through purely the running water already supplied to faucets. In locations such as Tanzania and Ethiopia, prolonged power outages can be a reoccurring problem. Individuals, families, and businesses are forced to spend limited income on disposable supplies such as batteries, kerosene, and candles to accommodate this. HEEL would be purchased and function just as any other faucet, however it features a small hydroelectric generator which is stored under the sink powering LEDs at the end of the faucet’s posable arm. The installation of this faucet means that so long as there is running water, light will follow, providing comfort and security to all in the dark.
During my experience in Studio V: User Experience Design at Rose-Hulman Institute of Technology, I collaborated with two other students to develop a solution to a real-world problem pertaining to the United Nations Sustainable Development Goals. This studio emphasized the importance user-centered design, so in the development of this project, we utilized industry level engineering tools such as Pugh Charts, Weighted Decision Matrices, and a House of Quality. Additionally, we conducted three rounds of user testing of our prototype. One during early product development to capture initial concept feedback, another round following the fabrication of a more refined physical prototype to analyze intended user-device interaction compared to actual user-device interaction. The third round of testing was conducted with our target users. After each round of user testing, we modified the design to accommodate any design flaws observed. An example of this can be seen below with the digital (CAD) models. The designs with a white background featured the generator internally, allowing for a simpler user installation but contributed to a larger unpleasant appearance for applications such as bathroom sinks. The two images with a dark blue background are the current design, which houses the generator below the sink, allowing for a smaller, sleeker design trading off a slightly longer user installation time. The intention of this product is for it to be installed in either kitchens or bathrooms. If this project was pursued farther, we would like to refine the current faucet optimized for bathrooms and design a new style of sink but using the same technology to better compliment the aesthetics of a kitchen.

Project Prometheus
Project Prometheus was a project conducted through my experience in Engineering Design Studio IV: Product Design at Rose-Hulman Institute of Technology. The opportunity was to develop a solution aid backpack campers in the process of building, maintaining, and containing their fires. This portable firepit collapses to fit in a backpack and can extend for use. This is a prototype, the actual device would use a material such as steel for a cooking surface, the darker grey section. The rest of the core structure would be made of titanium to withstand the heat while being rigid. A fiberglass material mixture would shroud roughly 2/3 of the sides to help protect the fire from wind and precipitation. The target group being backpackers, the device was engineered to be lightweight and easily portable.
Blink Dog
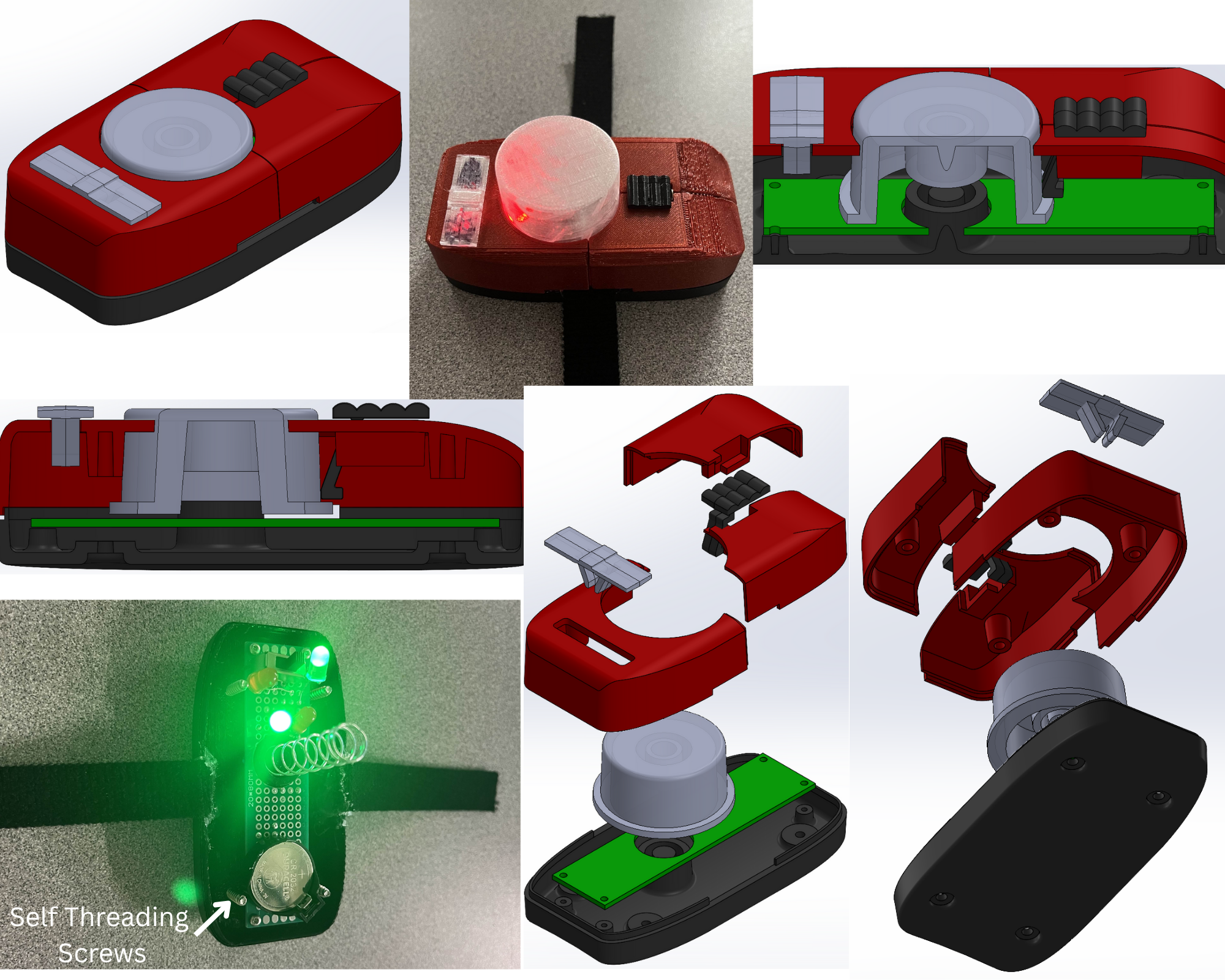
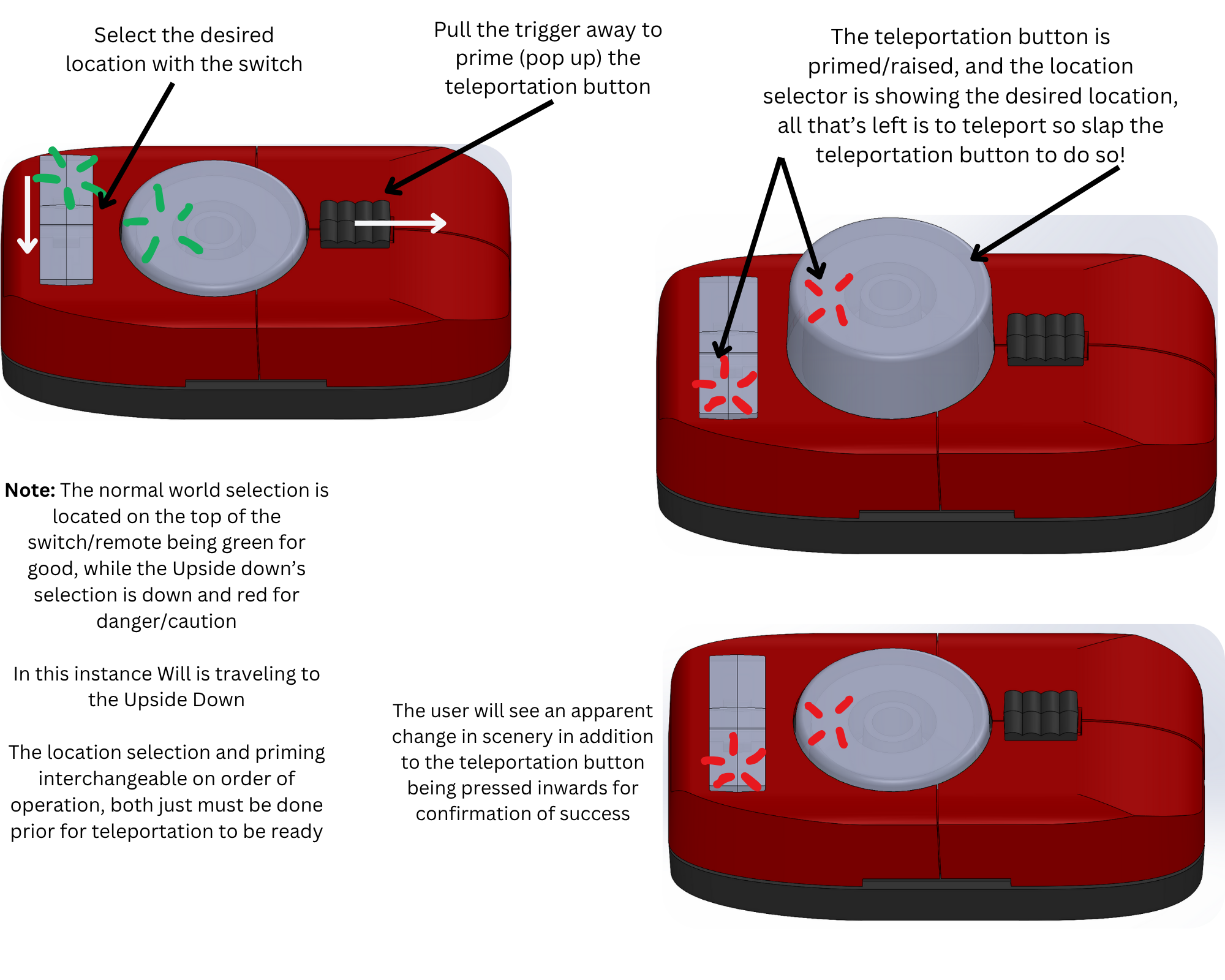
Blink Dog was a project conducted through my experience in Engineering Design Studio IV: Product Design at Rose-Hulman Institute of Technology. Tasked to develop a remote to automate some process for a fictional character, I designed a wearable device allowing Will Byers from Stranger Things to control his teleportation. The device was designed with the intent to deliver a positive visceral reaction to Will, taking inspiration from the Nintendo NES with significant beauty grooves and lack of large curvature. The device can be operated simply by selecting the location he wishes to travel with the switch, pulling the black trigger away, causing the large teleportation button to raise, and pressing the large, raised button.
The behavior of the remote was designed to help Will build confidence and feel empowered. The simple operation allows for the user to easily use the device. The large button “pops” up with a spring to help encourage Will to feel great when hitting it to teleport. The project called for a deep user analysis which can be seen in various aspects of trying to make a device similar to those of the time period, the size, and even the name. Blink Dogs are creatures in Dungeons and Dragons, a game that Will loves, which teleport to avoid danger, just as this device enables Will to accomplish.
Designing a device to complement the emotional values and aspects of the user leads directly to a more successful product and pleased user. It is easy to begin designing a device for yourself; however it is important to always think of how you can better accommodate the user. This is why user testing is so critical in developing a successful product.
Rotom VGC (Video Game Competition) Tracker
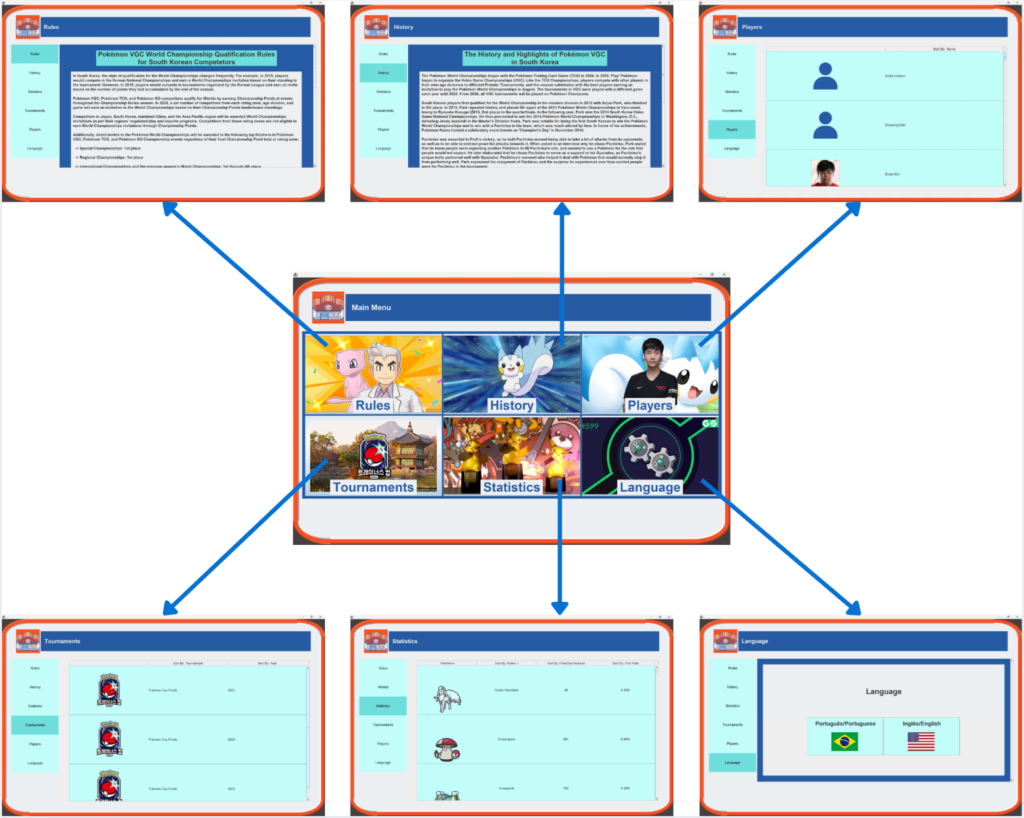
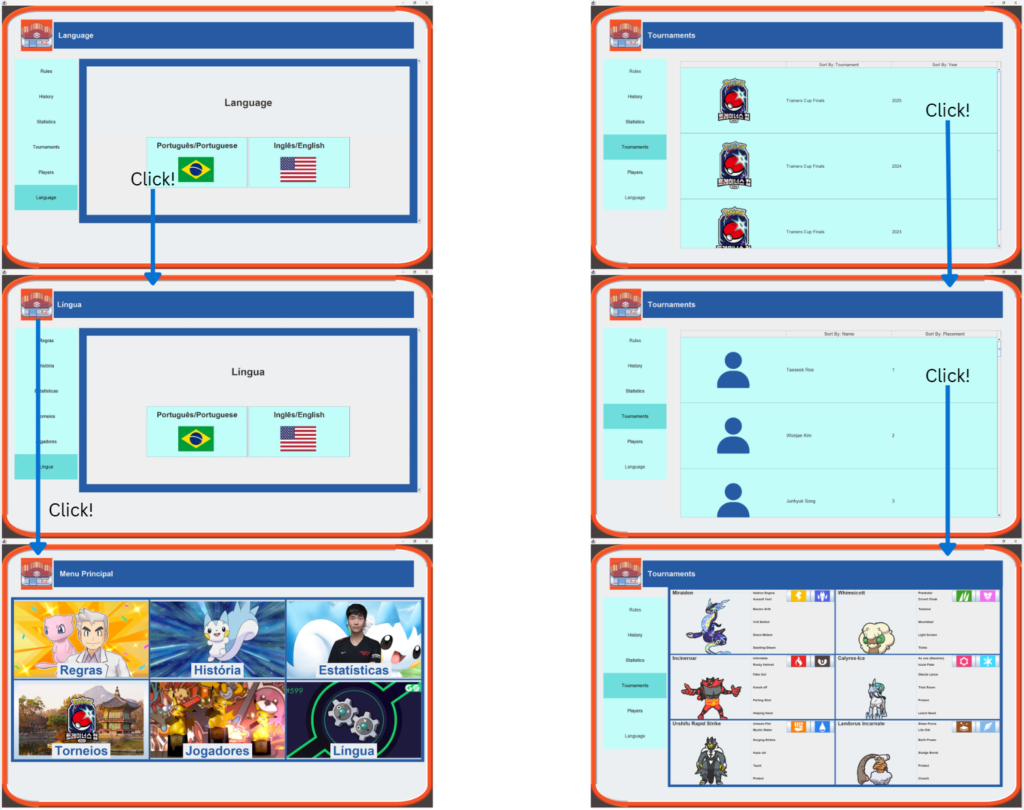
Rotom VGC is an application which was created by a team of three in my Engineering Design Studio VI: Modeling and Communicating Integrated Designs at Rose-Hulman Institute of Technology. This project was meant to aid Brazilian people in learning about and tracking the Pokémon competitive video game scene in Asia. The overarching purpose of this project was to connect two cultures through the usage of an entirely digital product created entirely using Java. Additionally, a large focus of the project was to make the app as user friendly as possible taking into account user design heuristic principles, and efforts in extensive localization. App localization was done through various consious decisions, such as using solely machine translation platforms (non LLM) and verification of translation during user testing with native speakers.
The app contains six main features, a rules page to help users better understand the uniqueness of the Asian circuit of Pokémon’s competitive video game scene and a history and highlights page to help better engage users with recent and important events. Additionally, the app tracks three different core concepts, tournaments, players, and pokémon. CSV files were manually created to consolidate data from across several other platforms, and displayed using the package, Javaswing’s, JTables which allow users to sort the data by various categories such as pick rates. One of Rotom VGC’s most useful features is the ability to display each team of pokémon that a player used in their respective tournament, allowing for users to see the chosen moves, abilities, and other useful information which can be helpful for fans or competitors who may be facing these players at a world championship. Finally, there is a language page to for a full translation of the application from Brazilian Portugues to English and vice versa. Rotom VGC was a great opportunity to apply knowledge of Java, combine it with user-facing design and testing, and ultimately aid in the connection of cultures.